Physical Address
304 North Cardinal St.
Dorchester Center, MA 02124
Physical Address
304 North Cardinal St.
Dorchester Center, MA 02124
Latest Create a robot Rooted in human anatomy. Researchers at the Swiss Federal Institute of Technology in Lausanne have developed a robotic hand with a wider range of motion than anything made of flesh and blood: it can detach from the arm and move, bend its fingers backwards, and even pick up and move multiple objects at once.
The detachable robotic hand, described in An article published Tuesday in the journal Nature Communicationswas developed in two stages. The first version of the robot had five fingers and demonstrated dexterity and agility similar to the human hand while still navigating tight spaces.
Don’t miss any of our unbiased technical content and lab reviews. Add CNET As Google’s preferred source.
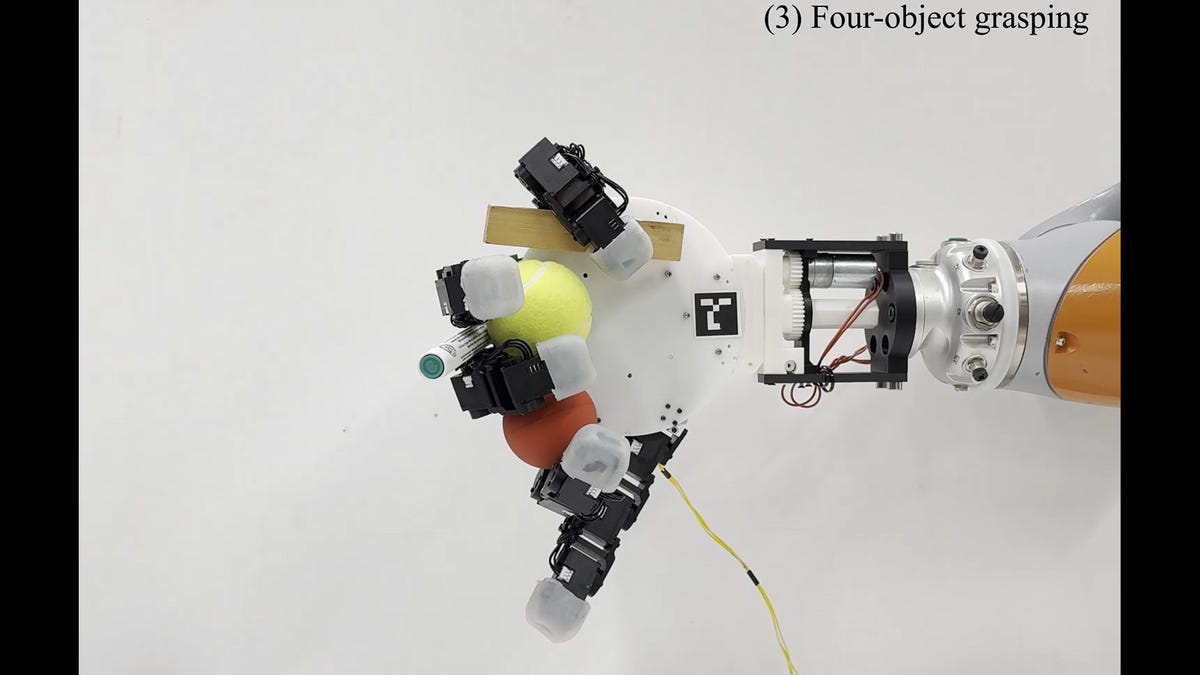
The second version of the robot used the sixth finger for further manipulation of grasped objects. The six-fingered robot was able to pinch and lift a small ball and use its fingers to simultaneously hold objects on either side of its palm. When linked to an arm, a hand can pick up larger objects in the same way a human would.
The most impressive display of ingenuity came from a simple test using a mustard bottle. The robotic hand unscrewed the cap while holding the bottle in place, demonstrating a high level of fine motor control.
The research team commented on this comprehensive control in their article, explaining how a robotic hand can go beyond typical human limitations.
“While our robotic hand can perform common grasping postures like human hands, our design goes beyond human capabilities by allowing any set of fingers to form opposing finger pairs, enabling simultaneous grasping of multiple objects with fewer fingers and non-stereostatic grasping.” The team noted in the article.
A representative for the research project did not immediately respond to a request for comment.
Researchers hope the hand will one day help in disaster relief or support warehouse and factory workers.
“The ability to crawl directly up to a target object and grab it also allows for efficient handling in environments such as warehouses, where objects may be located within dense shelves,” the team wrote. “Or in the field of service robotics, where the system can autonomously retrieve dropped items.”
In their article, the research team wrote that they hope their unconventional configuration will “work effectively in specialized environments that require enhanced processing capabilities.” While the proposed robotic hand is not anthropomorphic, it does not rule out the possibility of its use in prosthetic applications.
